|
|
|
![]()
![]()

![]()
1.2: Manipulators structures
The basic mechanical configurations of the robot manipulator are categorized as Cartesian, cylindrical, Polar and articulated.
Cartesian robot can moves its gripper to any position within a cube or
rectangle.
Advantages:
1) Moves in three linear directions that is x, y and z.
2) Save floor space because it is overhead mounting.
3) The control system is simple.
 4) Most rigid structure for given length, since it is supported at both ends.
4) Most rigid structure for given length, since it is supported at both ends.
Disadvantages:
1) Requires large volume to operate in, even though whole space is not used.
2) Largest surface area required of all configurations.
3) Some models the location of the drive mechanism makes the maintenance expensive.
Cylindrical robot can move its gripper within a volume of a cylinder. Movement of the robot in the cylindrical work ell requires a controller that can coordinate the motion of all axes, therefore the controller must be sophisticated than the controller used in Cartesian robot. Picture below show the work coverage of the cylindrical robot.
The picture above show the work coverage of the cylindrical robot.
|
Advantages: 1) Easy to visualize and compute. 2) Relatively easy programming. 3) Rigid structure, giving the capability to lift heavy loads through a large working space. 4) Good access into cavities and machine openings. Disadvantages: 1) Restricted volume of access. Restricted to areas close to the vertical base of the floor. 2) Both radius and vertical drives are exposed. This makes it difficult to seal from dust and liquids. Applications: Typically used in pick-and-place operations, e.g. materials handling. Picture on the right is a cylindrical robot from Fanic. |
|
Polar robot position the robot through the rotation and one linear actuation. Polar robot used either hydraulic or electric drives as the prime movers with pneumatic actuations used to open and close the gripper.
Advantages:
1) Can generate a large working envelope through one linear and two rotary axes.
2) Two rotary drives can be easily sealed.
Disadvantages:
1) Complex co-ordinates difficult to visualize and control.
2) May be problems to seal and protect the linear drive.
|
Applications: Used where a small number of vertical actions is adequate: the loading and unloading of a punch press is a typical application. Other areas of use could be: spot welding, and in case a pendulum type of robot (Irb1000) is used, assembly. Picture on the right shown a robot Irb1000 working. |
|
|
|
|

The picture above show the sample polar robot.
Articulated robot often called jointed arm, revolute or anthropomorphic machines.


Advantages:
1) All joints are rotary. Maximum flexibility since any point in the total volume can be reached.
2) It occupies a minimum of floor space, the robot achieve deep horizontal reach.
3) Joints can be completely sealed and protected. This is very useful in dusty or corrosive environments, or under water.
4) High positioning mobility of the arm allows the robot to reach into enclosure and around obstructions.
Disadvantages:
1) Very difficult to visualize and control.
2) Restricted volume coverage.
3) More sophisticated control requirements result in higher cost of the machine.
|
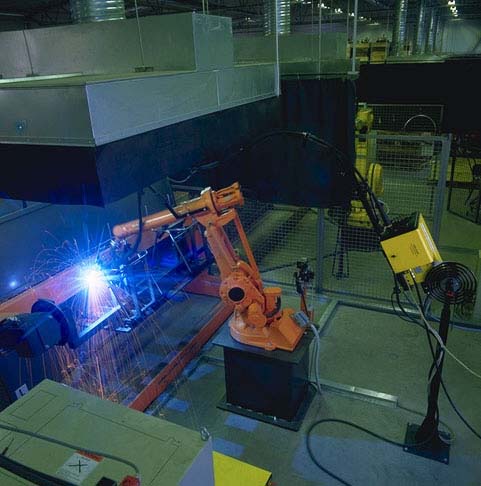
Applications: This is perhaps the most widely used arm configuration because of its capability to reach any part within the working envelope. Due to the flexibility, this robot type can be used in such advanced applications as spray painting and weld sealing. Picture on the right show the robot Irb2000 working. |
|